

Описание
Общее описание
PMC007 является своего рода миниатюрный встроенный шаговый двигатель микрошаговый контроллер, который может быть установлен непосредственно в задней части 28/35/42 (NEMA11/14/17) из нержавеющей стали серии шаговый двигатель. Контроллер серии предоставляет различные модели, которые могут быть выбраны на основе управления шиной can и различных значений тока. Легко достичь промышленной сети управления целых 120 узлов, которые могут достичь замкнутого цикла управления на основе кодировщика в соответствии с требованиями пользователя. PMC007 принимает промышленный стандарт CANOPEN DS301 протокол управления, который не только значительно упрощает сложность системы управления верхним слоем, но и максимально сохраняет гибкость управления, и подходит для всех видов высокой точности, широкий спектр использования в промышленности.
Особенности
Широкий диапазон 9-28 в одиночное напряжение питания Выходной ток 0.2A ~ 2A. Регулируемый фазовый ток с помощью команд Автоматическое управление ускорением и замедлением кривой S Поддержка неизвестного режима/скоростной режим/режим PV/режим PP/режим PVT/Аналоговое регулирование скорости/Аналоговое позиционирование/синхронный режим позиционирования и другие режимы движения 3 внешних переключателя входных портов для настраиваемой аварийной остановки Поддержка 0/2/4/8/16/32/64 ГБ/128 разрешение микрозон Подходит для детей на возраст от 4/6/8 линий 2-фазный шаговый moto Поддержка PVT кубический сплайн интерполяция Синхронизация синхронного управления в масштабном и многоосевом сценах применения Волшебная Управление освещением Горение и автономное автоматическое выполнение пользовательской программы Поддержка перетаскивания Графический программирования Поддержка программирования языка LUA script Миниатюрный размер 28x28x15,6 мм Прецизионный алюминиевый корпус, благоприятный для защиты и отвода тепла Автоматическая защита от перегрева, перегрузки по току, перенапряжения и перенапряженияТерминал место порт
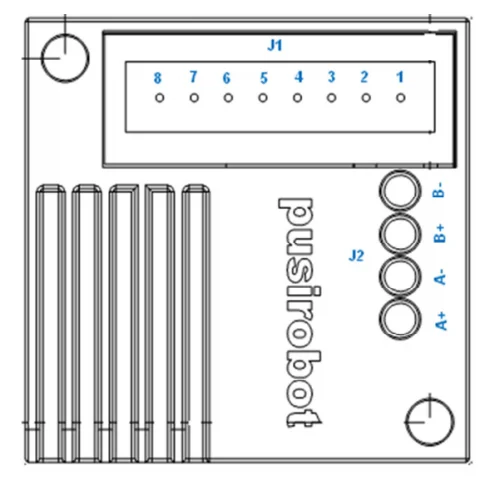
Соединение мотора J2
| Pin-код №: | 1 | 2 | 3 | 4 |
| Целеуказатель: | M10 | M11 | M20 | M21 |
Соединение сигнала J1
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Постоянный ток | GND | Кань | CANL | DVDD | AIN | ENC1 | ENC2 |
Описание:
Производство выбор
| Описание продукта: | |
| Хост | ПК PLC MCU |
| Поддержка мотора | 2-фазный шаговый двигатель |
| Условия разработки | VC C # Labview VB Linux pyton |
| Напряжение питания | DC9-28V |
| Выход ток | DC0.4-2A |
| Microstepping | 0/256 |
| Темп. Диапазон | От-20 ℃ до 80 ℃ |
| Максимальная частота импульсов | 200 K |
| Долговечность | Более 20000 часов |
| Входной сигнал | |
| Общие ввода/вывода | Описание продукта: |
| Функция ввода/вывода: | Вход аварийной остановки, Управление тормозом, цифровой вход/выход, аналоговый вход, сброс до заводских настроек, выход 5 В |
| Входной Технические характеристики | Входной Технические характеристики |
| Аналоговая регулировка скорости Входное напряжение: 0-3,3 В | |
| Входное напряжение аварийной остановки: 0-24 В | |
| Управление режим | |
| Описание продукта: | |
| Поддержка режим управления | Режим положения, скоростной режим, режим PV, режим PP, режим PVT, аналоговая регулировка скорости, аналоговое позиционирование, синхронное позиционирование |
| Режим переключения | Указанные инструкции переключения |
| Связь | |
| Описание продукта: | |
| Протокол | CANopen DS301/DS402 |
| Скорость передачи данных: | 5 k-1 Мбит/с |
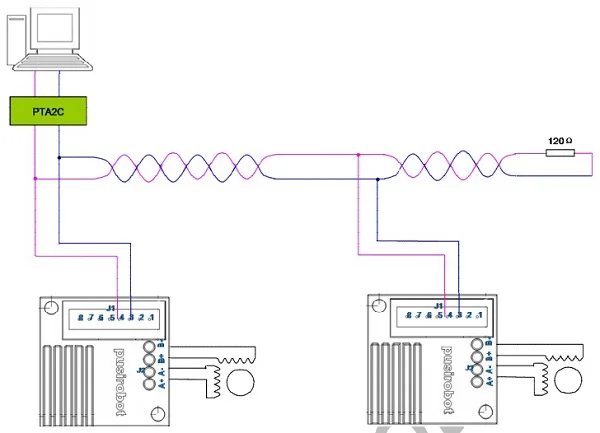
Доступ к сети Управление
Использование подключения CAN bus может достигать максимального расстояния передачи 5000 метров. Он предоставляет сетевую схему, которая использует CAN bus для подключения нескольких контроллеров PMC007CxSxP на следующем рисунке, которые совместимы с CAN2.0A и CAN2.0B двумя техническими спецификациями и могут быть подключены к 127 узлам.
Специальное приложение Описание
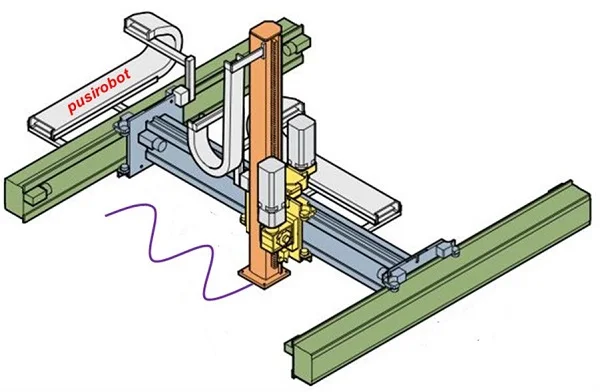
Многоосевые интерполяции
Контроллер PMC007 может быть настроен как режим движения PVT. В этом режиме контроллер использует PUSIROBOT Уникальный алгоритм интерполяции кубического сплайна. В то же время Координата, контроль положения и скорости многоосевой точно, так что конечный механизм может осуществить траекториюЛиния, дуга и сложная кривая, это важная особенность в использовании руки робота или нескольких осей, как показано на рисунке ниже.В применении литературного творчества, например, плавающей матрицы шара, матрицы часов, зонтичной матрицы и т. Д. Для того, чтобы представить комплексное представление, необходимо синхронизировать сотни осей. Контроллер PMC007 использует специальный алгоритм оптимизации, который может значительно уменьшить нагрузку шины и улучшить отклик в реальном времени.
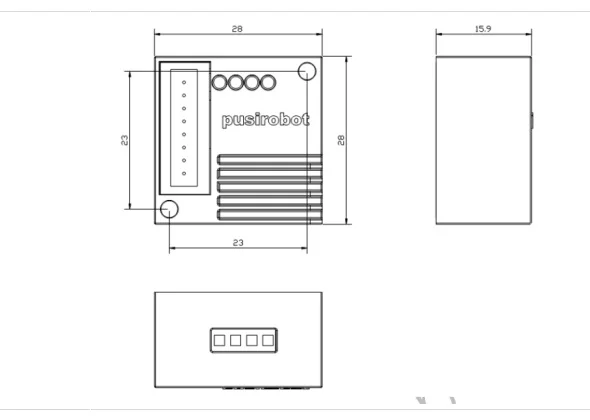
Размеры (единица измерения: мм)
Посылка в том числе

Сертификаты квалификации
Сертификат патента
Информация о компании




PUSIROBOT официального магазина Carter's
Характеристики
- Бренд
- PUSIROBOT
- Тип двигателя
- Шаговый электродвигатель
- Номер модели
- PMC007C2
- Voltage
- 9-28DC
- current
- 0.2-2ADC
- Motor Size
- NEMA11
- Volume
- Miniature
- Model Number
- PMC007C2
- Color
- Black
- Interface bus
- CAN
- Support upper computer
- PLC/PC/MCU
Сопутствующие товары







