

Описание
Ⅰ обзор
С целью решения проблем существует на открытой исходной плате контроллера, такой как Ramps 1,4, разработчики в Makerbase специально оптимизируют и разрабатывают новый продукт, MKS Gen_L, который обеспечивает более гибкий выбор для пользователей.
Ⅱ Особенности
1. 2560 и Ramps 1,4 интегрированы в плату, что позволяет избежать сложных разъемов.
2. Поддерживает различные Шаговые драйверы, такие как A4988, DRV8825, TMC2100 и LV8729, доступные для изменения шаговых драйверов и двигателей, как нравится пользователям.
3. Резервный внешний сигнал водителя, доступный для подключения внешнего высокотокового драйвера для привода 57 и 86 шаговых двигателей.
4. Используйте высококачественный MOSFET, лучшее охлаждение и более стабильный.
5. Применение удельную мощность чип, поддержка 12 V-24 V вход питания, и решить проблемы, связанные с чип отопления и недостатка силы.
6. Стабильная и надежная схема фильтра значительно уменьшает помехи и позволяет избежать сбоев, как это возможно в процессе печати.
7. Используйте чип последовательного порта CH340, более легко установить накопитель, чем 16U2.
8. Запуск прошивки Marlin, конфигурация полностью такая же, как Ramps 1,4, и доступна для прямой замены Ramps 1,4.
9. Поддержка Ramps 1,4, 2004LCD, 12864LCD, TFT28 и TFT32.
10. Доступный для ввода 24 В, ток подогреваемого слоя может быть уменьшен до 1/4 при той же мощности системы, которая эффективно разрешает проблему, что MOSFET подогреваемого слоя нагревается.
11. Ось X, ось Y и ось Z с различными цветами терминал контролирует шаговые двигатели и концы, которые удобно проводить.
12. Подключите Шаговые драйверы в соответствии с различными цветовыми клеммами, что уменьшает вероятность обратного хода и предотвращает повреждение платы контроллера.
Ⅲ соединением и размерами
Физическая карта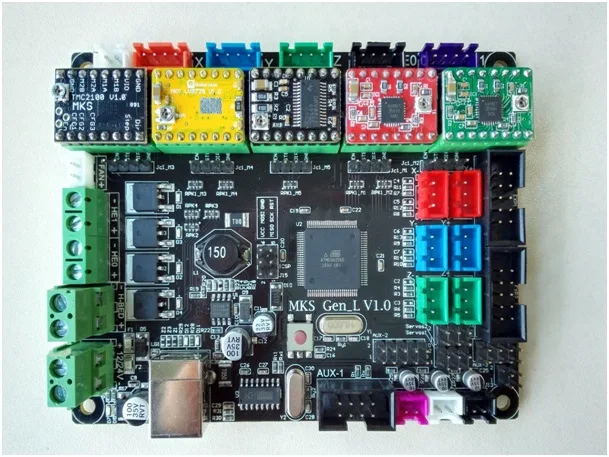
2. Схема подключения системы

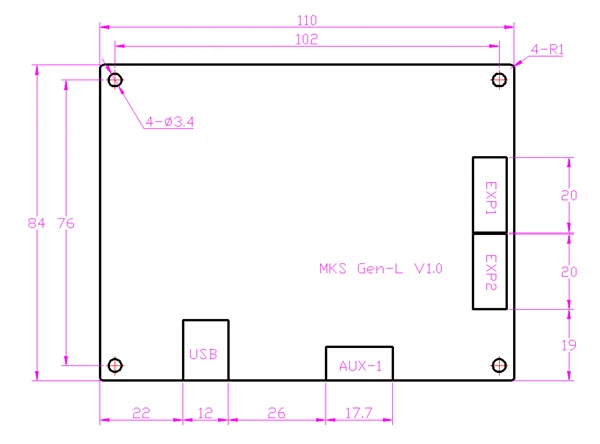
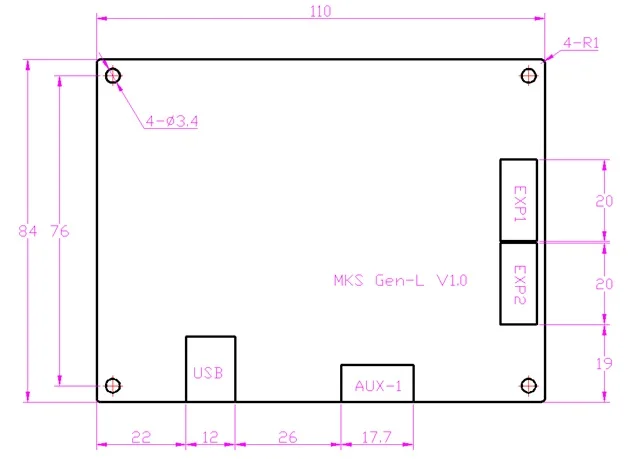
3. Установка мерного рисунка
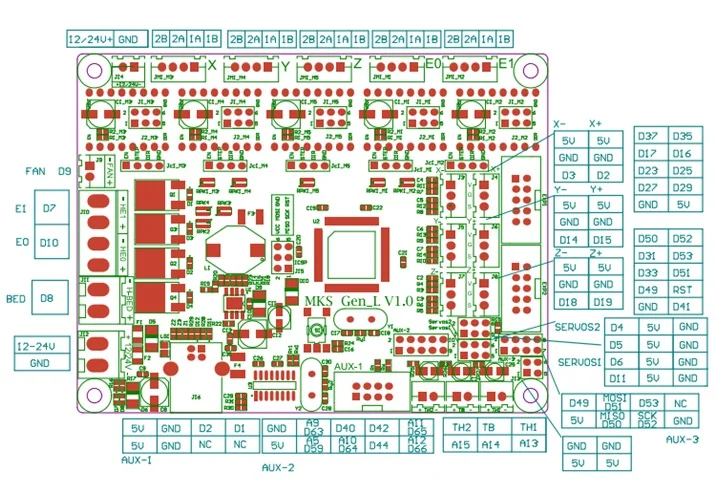
4. PIN-карта порта
5. Соединение с различными шаговыми драйверами
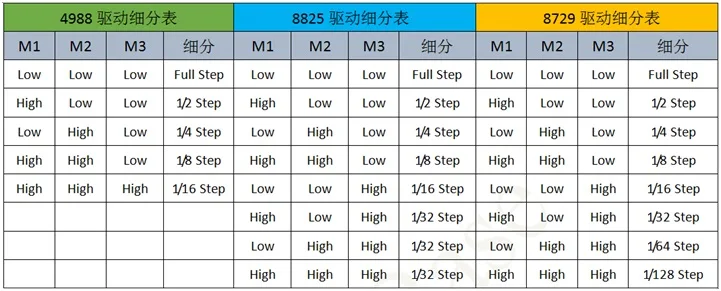
6. Драйвер микрошаговый стол
Это M1, M2, M3 в свою очередь слева направо;
Штекер перемычки означает «высокий», штекер перемычки означает «низкий».
Ⅳ инструкции
1. Приобретите прошивку и привод
Разместите сайт для загрузки:Https://github.com/makerbase-mks?tab=repositories
2. Установите привод
2,1 найдите файл диска в компьютере, дважды нажмите на DRVSETUP64
Для установки накопителя.
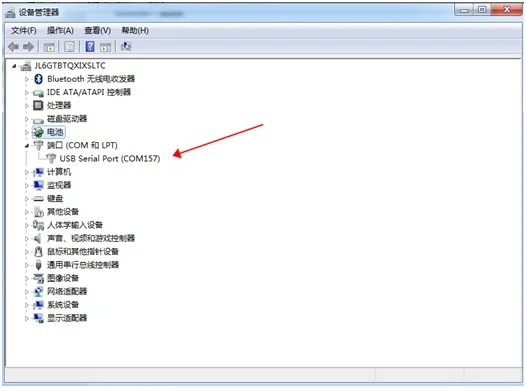
2,2 После подключения USB вы можете увидеть com-порт в управлении устройствами.
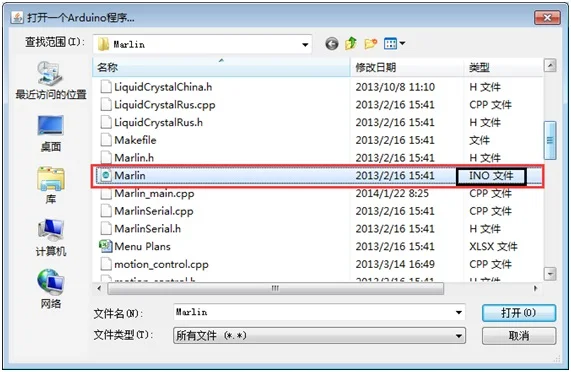
3. Загрузите прошивку marlin
Во-первых, откройте Arduino, выберите прошивку marlin и выберите суффикс “***. pde” или “***. ino” файл для открытия.
Во-вторых,

Затем
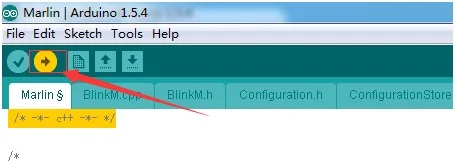
Наконец, завершите загрузку, когда светодиодный индикатор на плате контроллера перестанет мигать.
Ⅴ модифицировать прошивку
1. Выберите скорость передачи, скорость передачи должна быть такой же, как у верхнего монитора, обычно выберите 115200 или 250000;

2. Выберите тип платы контроллера, выберите 33 или BOARD_MKS_BASE.

3. Выберите тип датчика в соответствии с вашим тепловым типом. Термистор NTC100K, термопара PT100 и термопара ad579. Если вы используете тип термопары, вы должны изменить его в "Pins. h". Возьмите в качестве примера контактный порт A11 на плате контроллера MKS BASE,

4. Есть два типа фиксатора, всегда-ВКЛ и всегда-ВЫКЛ.
Always-on mechanical endstop, выберите «true».
Всегда выключаемый оптический конечный стоп, выберите «false».

5. Контролируйте направление движения шаговых двигателей.

6. Максимальное место назначения каждой оси, то есть самый большой размер печати принтера.

7. Установите количество импульсов для каждой оси. Формула для расчета пульса на двигатель:
Синхронизация колеса: (360/шаг расстояние) * микрошаг/(диаметр * 3,14)
Свинцовый винт: (360/шаг) * микрошаг/свинец

Характеристики
- Бренд
- FLYING BEAR
- Номер модели
- MKS GEN-L V1.0
- Сертификация CE
- Нет
Сопутствующие товары








