



Описание
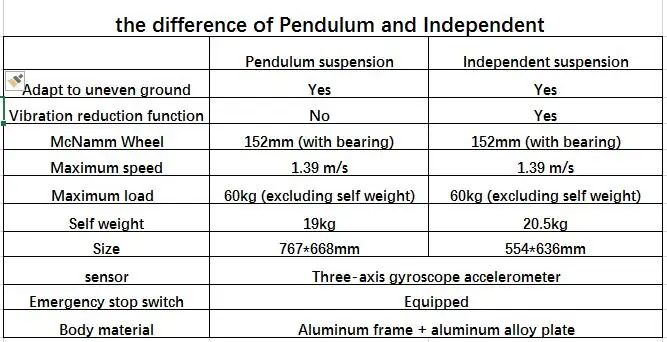
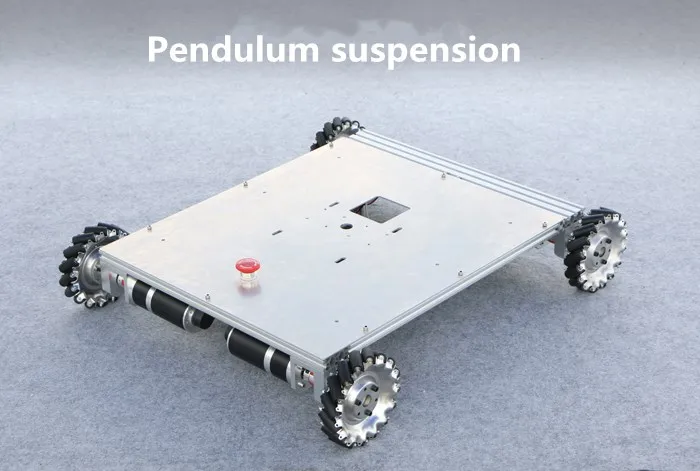
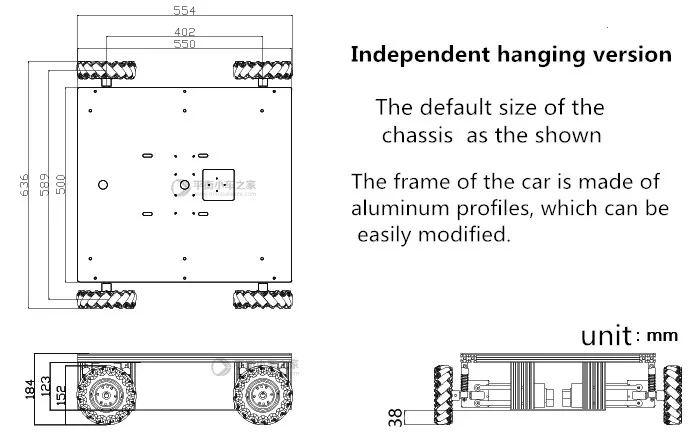
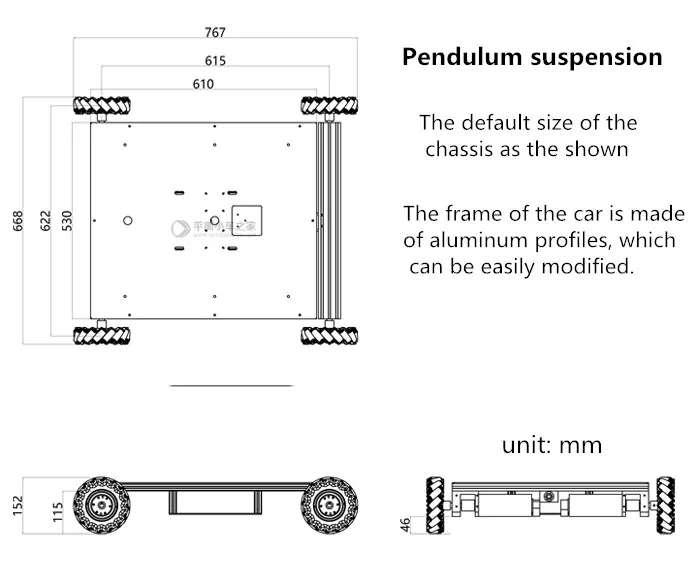
В целом, в конкурсах колледжа используются отдельные подвесы (тележки оснащены паралелограммными подвесами), которые не только могут адаптироваться к неровному грунту, но и имеют функцию демпфирования. Он больше подходит для использования в сценах, связанных с обработкой изображений и мобильной фотографией, чем маятниковая подвеска. Маятниковая подвеска (ненезависимая подвеска) также может быть адаптирована к неровной поверхности, но не обладает амортизацией. Следует обратить внимание, что независимая подвеска сложна, и необходимо отрегулировать пружину или тому подобную в зависимости от различных нагрузок. Для общего использования рекомендуется приобрести вариант маятниковой подвески.


Отгрузочная ведомость:
Электронный контрольный список поставки:
STM32F103RC контроллер (интегрированный с IMU CAN и т. д.) * 1 Двойной высокий ток MOS drive * 2 Плата адаптера питания * 1 OLED дисплей * 1 Литиевая батарея SAH 22,2 V * 1 Защищенное литиевое зарядное устройство * 1 Проводной контроллер PS2 и приемник * 1 Линия загрузки данных * 1 Кабель * 2Упаковка: купите любую посылка, соберите и протестируйте, и поставьте деревянную коробку, чтобы обеспечить безопасную транспортировку!
Интерфейс Описание:
Может: Мобильная платформа может получать команды от порта CAN, а также может отправлять свои собственные данные (одометр и IMU) через порт can. Последовательный порт: Мобильная платформа может получать команды от последовательного порта, а также может отправлять свои собственные данные (одометр и IMU) через последовательный порт. Интерфейс USB: используется для подключения к компьютеру, загрузки программы одним нажатием кнопки, и получения командного управления, отправленного компьютером и отправки своих собственных данных (одометра и IMU) на последовательный порт. Bluetooth: может отправлять свою собственную информацию в приложение, может получать инструкции дистанционного управления приложения, может регулировать параметры PID Интерфейс PS2: оснащен контроллером PS2, предоставляющим код plug and play SWD интерфейс: предоставляет SWD интерфейс для онлайн-отладки.Открытый источник и описание алгоритма:
Предоставляет полный исходный код мобильной платформы и схему контроллера. Драйвер MOS module не предоставляет схему, но предоставляет подробное руководство. Предоставьте подробные протоколы связи и руководства по разработке для интерфейсов. Кроме того, есть заметки по разработке PID и видеоучебные материалы. Мобильная платформа в основном предназначена для решения проблемы «изготовления колес» в рамках проекта, встроенного PID закрытого цикла управления и кинетического анализа, и может получать команды от последовательного порта и может или даже ноутбука.Характеристики
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Материал
- Металл
Сопутствующие товары









